Unter dem Motto „So wollen wir arbeiten“ diskutierte die Versammlung der Vertrauensleute im Produktionsstandort VW Nutzfahrzeuge Hannover die Zukunft der Arbeit. Vom „Büro der Zukunft“ über Herausforderungen für Tarifverträge durch „Arbeit 4.0“, von den modernen Logistikkonzepten und dem 3-D-Druck bis hin zur neuen Menschen-Roboter-Zusammenarbeit (Mensch-Roboter-Interaktion MRI) reichten die Fragestellungen. Welf Schröter, Moderator des Blogs Zukunft der Arbeit und Leiter des Forums Soziale Technikgestaltung hob die Chancen und Potenziale von „Industrie 4.0“ für die Humanisierung der Arbeitswelten hervor.
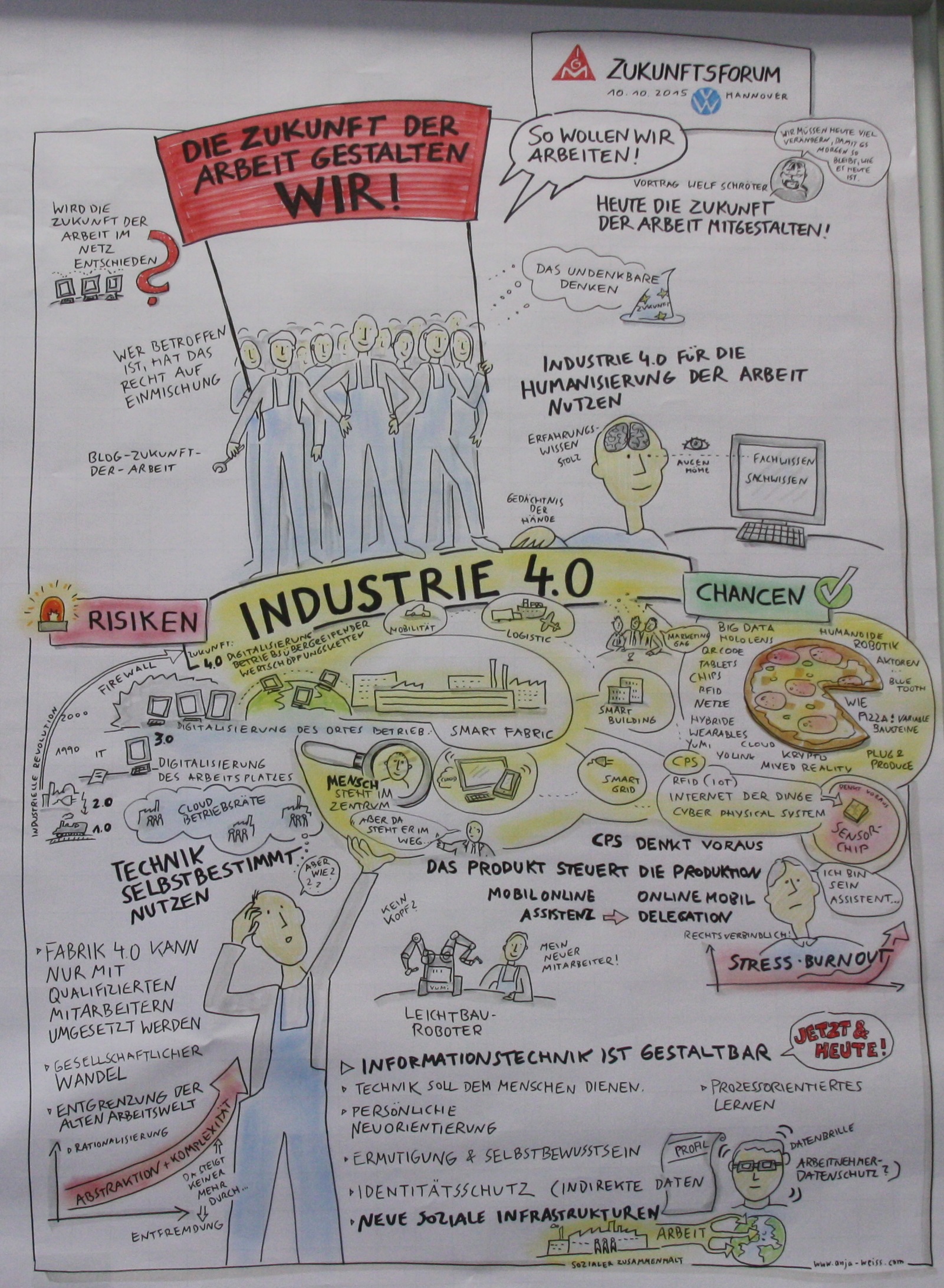
Grafic Monitoring von Anja Weiss (www.anja-weiss.com)
Der Referent betonte unter anderem, dass gerade die weitreichende Verknüpfung von materieller und nicht-materieller Arbeit, von Gegenständen und dem „Internet der Dinge“, vom Sensor-Chip am Gegenstand (CPS) und der virtuellen Weiterverarbeitung von dessen Daten eine große Herausforderung für die Würde der Arbeit darstelle.
Es gelte, die Selbstbestimmung des Menschen gegen die einseitige Taktgeberschaft „intelligenter“ Technik zu wahren. Die IT-Technik sei eine offene Technologie und grundsätzlich gestaltbar. Entscheidend sei, die Interessen hinter der Technik zu erkennen. Deshalb sei es wichtig, dass Betriebsräte wieder vermehrt soziale Technikgestaltung als Ort der Interessensdurchsetzung nutzen.